

Author - AGV BlogMaster

“Nope, I gotta explore” — Stupid RL agent The aim of Safe Reinforcement learning is to create a learning algorithm that is safe while testing as well as during...

Today, Driver Assistance Systems have made significant progress and several new algorithms have been designed to improve the understanding of environment surrounding the...

One of the first tasks I did as a part of the Autonomous Ground Vehicle research group was to implement localization and mapping, way back at the end of my first year...

One of the major tasks which need to be accomplished for the purpose of making driverless cars a reality is the ability to detect objects in an image. In essence, the...
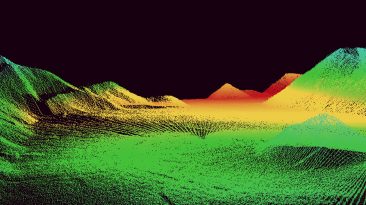
My friend Siddharth had thought of an idea to use a laser and a webcam to mimic a 2D LIDAR and had registered for IBM Day a while back. The date for the presentation was...
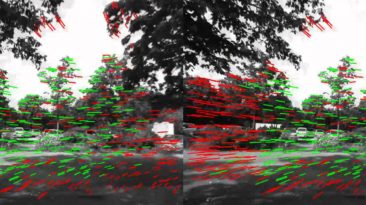
Odometry in robotics is a general term which refers to estimating not only the distance traveled but the entire trajectory of a moving robot. So, for every instance of...